Beskrivelse
Scanningsprober kan indsamle flere hundrede overfladepunkter hvert sekund, hvilket muliggør måling af form såvel som størrelse og position.
Scanning prober kan også bruges til at indsamle diskrete punkter på en måde, der ligner berøringsudløsningsprober.
Et udvalg af løsninger er tilgængeligt, passende til alle størrelser og konfigurationer af CMM.



Scanning forklaret
Scanning tilbyder en hurtig måde at indfange form- og profildata fra prismeformede eller komplekse komponenter.
Mens berøringsudløsningsprober indsamler diskrete punkter på overfladen, erhverver scanningssystemer store mængder overfladedata, hvilket giver et klarere billede af emnets form og facon. Scanning er derfor ideel til måleapplikationer, hvor formen af en funktion er en væsentlig del af den samlede fejlbudget, eller hvor komplekse overflader skal inspiceres.
Scanning kræver en fundamentalt anderledes tilgang til sensordesign, maskinstyring og dataanalyse.
Renishaw scanningsprober har innovative, letvægts passive mekanismer (ingen motorer eller låsemekanismer), der udviser en høj naturlig frekvens, hvilket gør dem egnede til hurtig scanning. Isolerede optiske metrologisystemer måler direkte defleksionen af stylussen (ikke via stablende akser inden for probemekanismen) for bedre nøjagtighed og hurtigere dynamisk respons.
Hvordan fanger og analyserer et scanningssystem overfladedata?
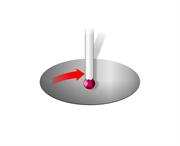
Scanningsprober giver et kontinuerligt defleksionsoutput, der kan kombineres med maskinens position for at bestemme placeringen af overfladen. Når der scannes, bringes probe-stylusspidsen i kontakt med funktionen og bevæges derefter langs overfladen, mens der indsamles data undervejs. I løbet af målingen er det nødvendigt at holde defleksionen af probe-stylussen inden for måleområdet for proben.
For de bedste resultater kræver dette tæt integration af sensor og maskinstyring samt sofistikerede filtreringsalgoritmer til at konvertere de resulterende data til brugbare overfladeinformationer. Scanningsdrevalgoritmer kan tilpasse sig konturerne af delen, ændre scanningshastigheden for at passe til krumningshastigheden (gå hurtigere på fladere overflader) og justere dataindsamlingshastigheden (tage flere data, hvor overfladen ændrer sig hurtigt).